Quantitative Engineering Analysis Course Assistant, 2020
I was an assistant for a first-year course that teaches students calculus, linear algebra,
physics, and engineering simulateously. In addition to tutoring, I prepared and repaired
the Neato robotic vacuums that students control via MATLAB and ROS in the second half of
the course. I helped with the creation of remote course elements following campus closure
and continued tutoring students remotely. The robotics module normally runs in a physical
classroom, but the remote version relied on a physics simulator for which I provided CAD
models to make the challenges engaging and familiar.
Course Website
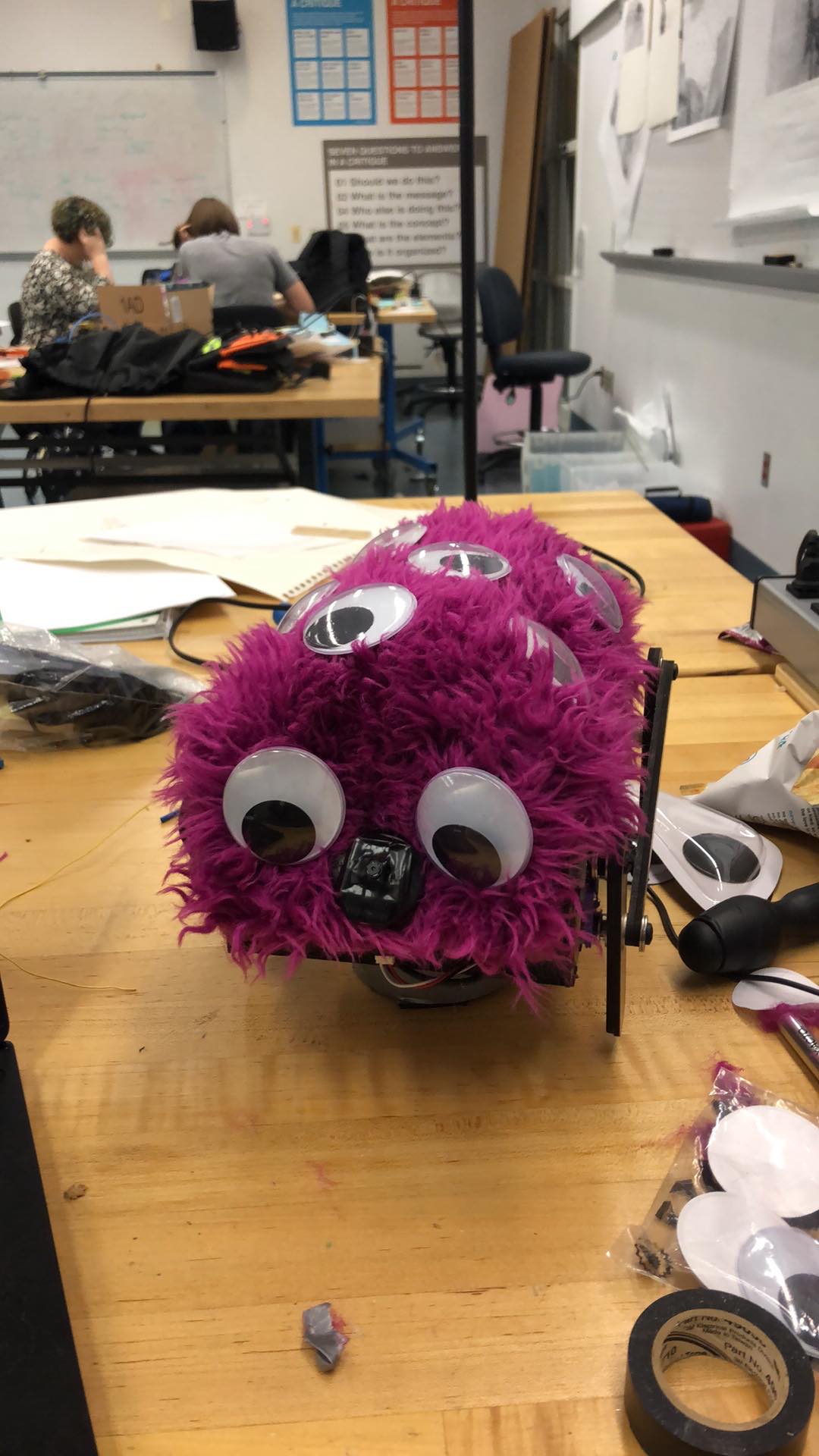
The Wanderer, 2019
We built a walking robot, called the Wanderer, that uses OpenCV to see people as it wanders around.
When it sees people, it greets them, and when the people leave it says goodbye. I learned about
robotic systems integration in this project by designing power circuitry and connecting all
electrical hardware for the software subteam. I also worked in the mechanical subteam to ensure
internal components had enough space in the final assembly.
Project Website
The Floor is Lava, 2019
A foot traffic heatmapping utility to inform retail store layout and provide information about
shopper habits. This project uses computer vision to identify where people are in a video and
determines where in frame they spend most of their time.
Project Website
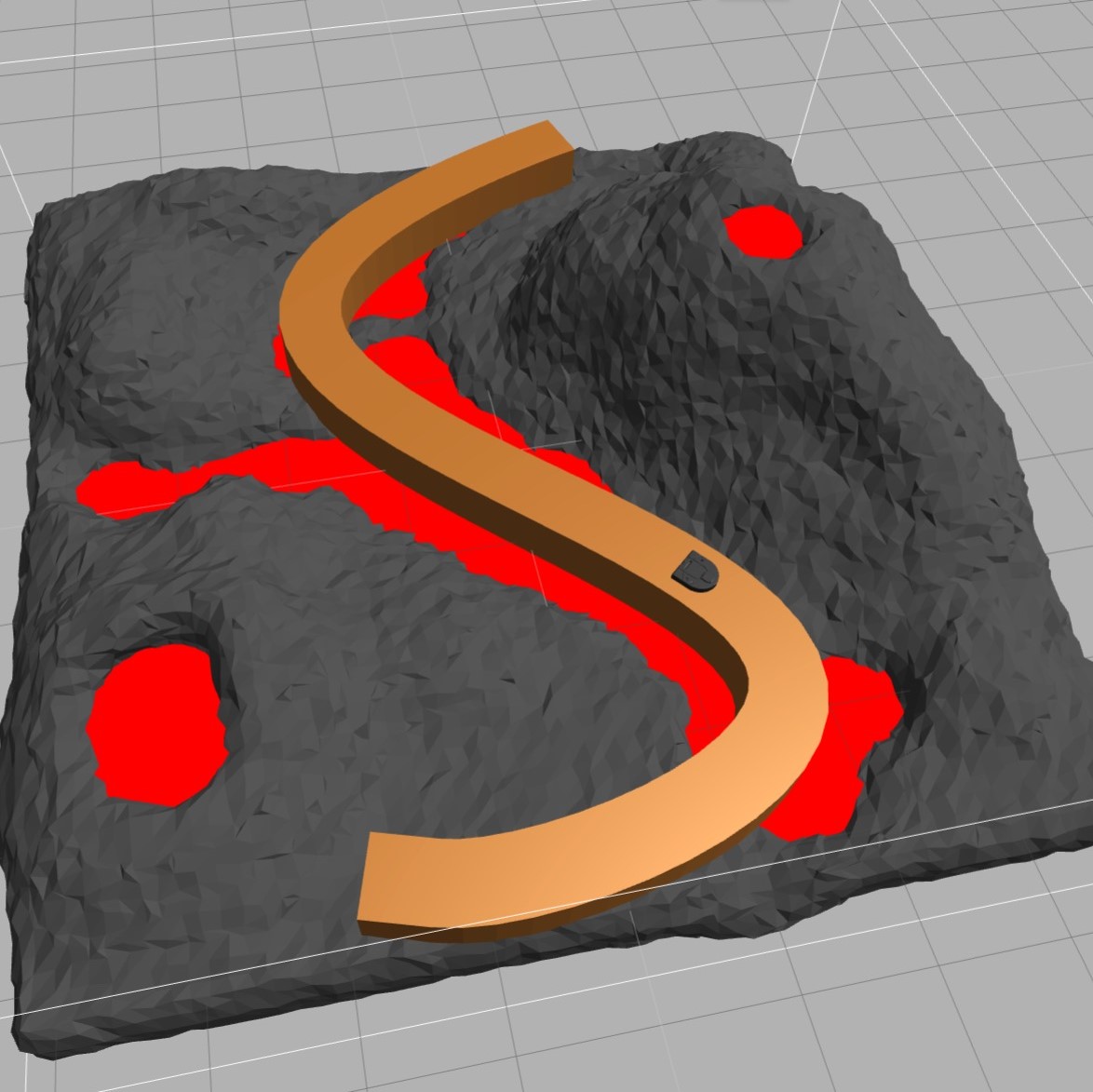
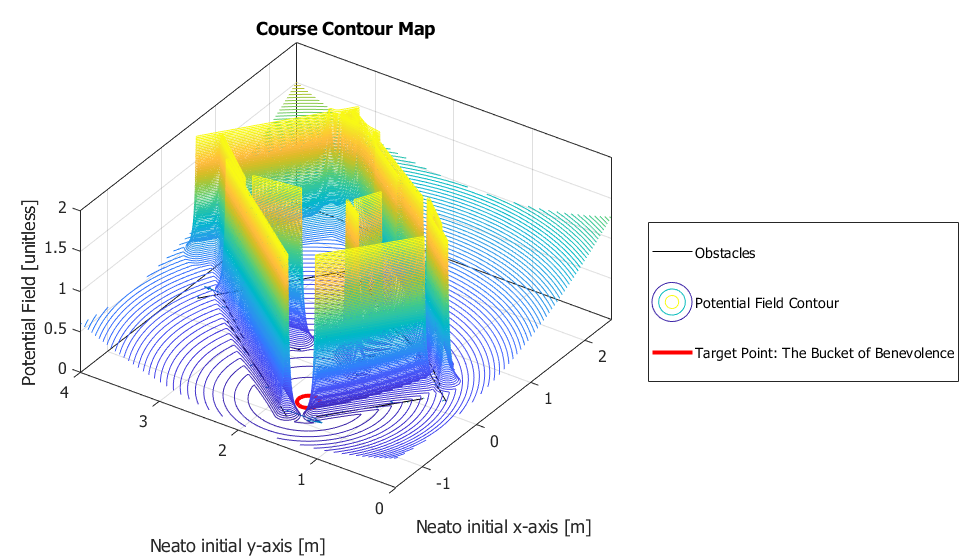
Gradient Descent Navigation, 2019
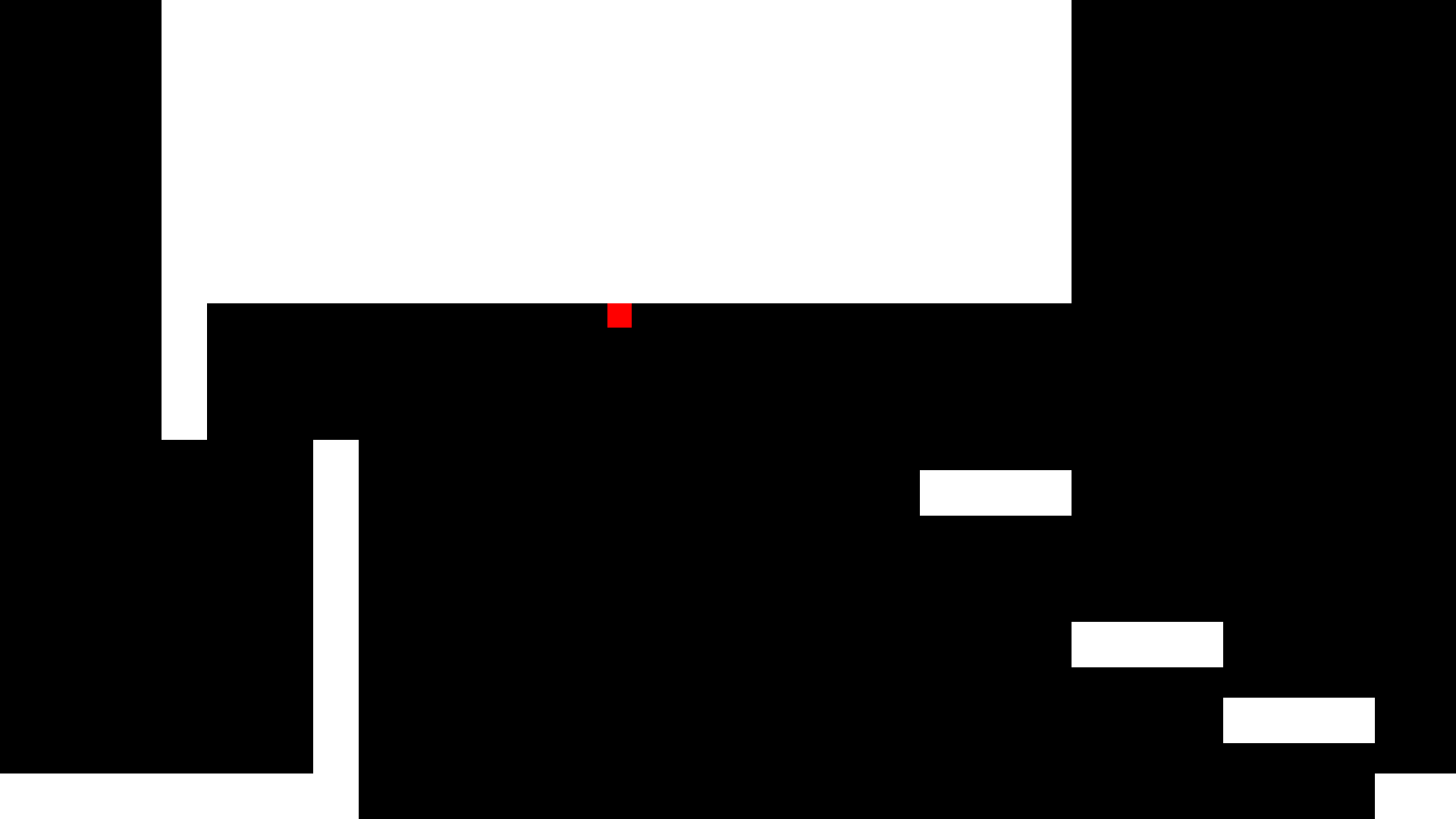
In the course, Quantitative Engineering Analysis, we were tasked with guiding a robot called a NEATO through an obstacle course to a bucket. I used the LIDAR sensor and wheel encoder data to reconstruct the challenge environment as line segments in the plane with a point as the target position of the bucket. I took these line segments and target point as input for a potential field function, creating an overall downhill slope to the target with uphill regions representing obstacles. The robot then follows a path around obstacles to the target by executing a gradient descent algorithm on the potential field.
Red Cube Platformer, 2019
This game written in Python with the Pygame module allows the player to run around a randomly generated side-scrolling level set. The game allows the player to run, jump, wall-jump, and climb on the ceiling using a simple physics/collision engine made from scratch. Made for Software Design, this project's focus was on creating an interactive program; Skye Ozga and I chose to make this game because we have enjoyed similar games in the past. I still update this every once in a while, and you can view the most recent source code on my GitHub.
Human Motion Project, 2016 - Present
From starting a project wanting to build a prosthetic foot to designing portable human motion measurement system today, this project has changed lot over the years. The Human Motion Project seeks to expand accessibility human motion data to remote and underpriveledged places by creating a system is based on inertial sensors instead of camera arrays. I am currently working on the fourth major prototype of the measurement device, focusing now on how the user experience for both researchers and hobbyists. The other members of this project team and I are currently seeking a patent sponsorship for our work.
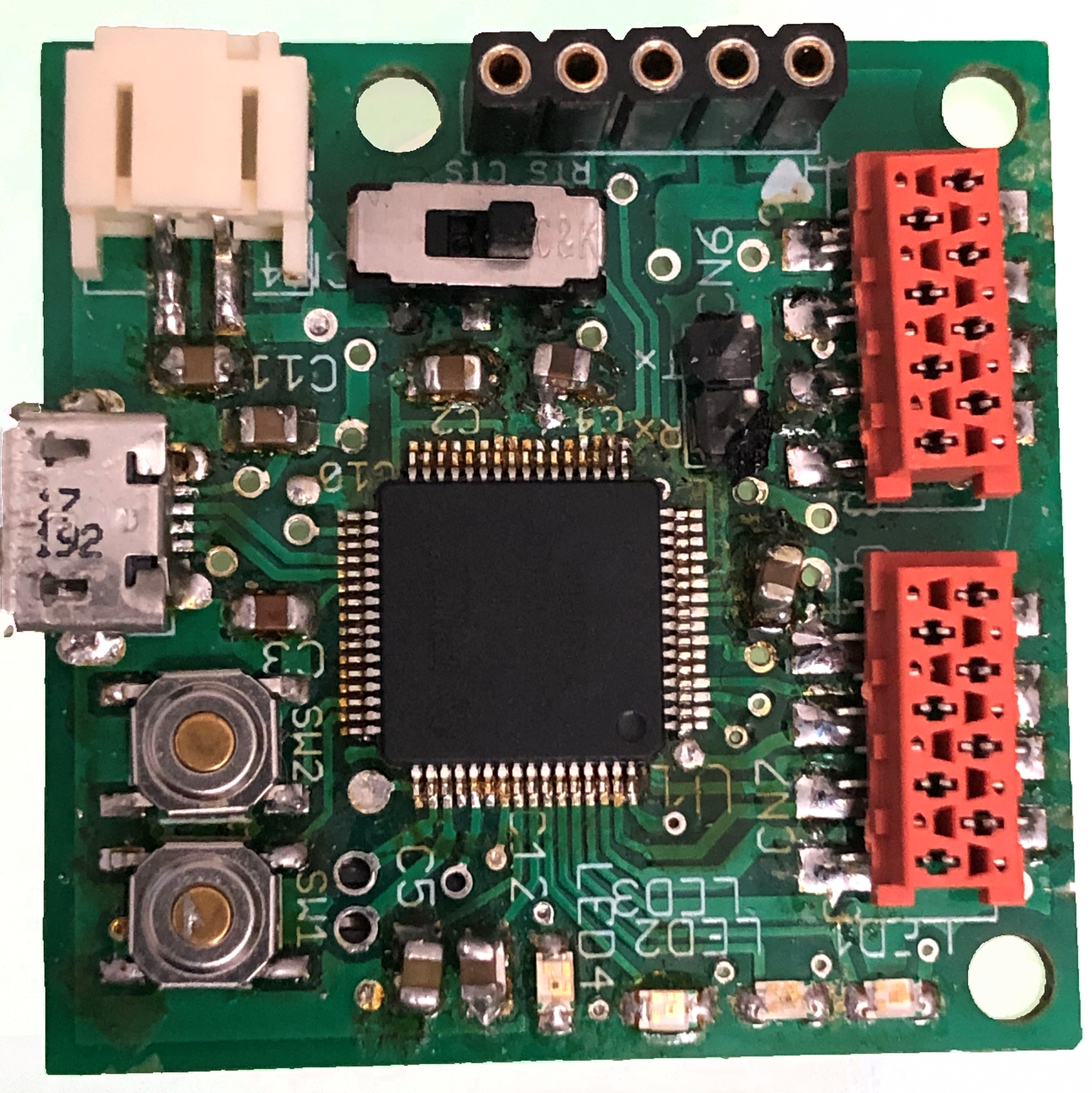
Minibeacon Project, 2018
In the weather balloon research group HARBOR, we track the balloon in multiple ways. The Minibeacon is a line-of-sight tracker mainly used as tertiary tracking and for recovery. One device with the balloon, transmitting its position data to a ground unit that indicates the distance, azimuth, and angle of elevation to balloon. Other devices on the balloon measure particulates and certain chemicals in the air, which we then use for research. Cameras also often fly on the balloon, giving great photos and further material for research.

